รู้จักกับ Rotary Encoder เบื้องต้น
สารบัญ
โรตารี่เอนโค้ดเดอร์ (Rotary Encoder) เป็นอุปกรณ์สำคัญที่ถูกใช้อย่างแพร่หลายในงานอุตสาหกรรมและระบบควบคุมอัตโนมัติ แล้วคุณเคยสงสัยไหมครับว่า เครื่องจักรจะรู้ได้ไงว่ามอเตอร์หมุนไปกี่รอบ หรือแขนกลหยุดตรงตำแหน่งที่ตั้งค่าไว้ได้อย่างแม่นยำได้อย่างไร คำตอบอยู่ที่อุปกรณ์ตัวเล็กแต่ทรงพลังชิ้นนี้ โดยบทความนี้เราจะพาเพื่อน ๆ ไปทำความรู้จักกับ Rotary Encoder ว่าคืออะไร ทำงานอย่างไร และมีกี่ประเภท พร้อมทั้งอธิบายหลักการทำงานของแต่ละแบบให้เข้าใจง่ายขึ้น อ่านจบแล้วรับรองว่าคุณจะรู้จัก Rotary Encoder มากขึ้นและเข้าใจว่าทำไมอุปกรณ์ชิ้นนี้ถึงเป็นหัวใจสำคัญของงานควบคุมตำแหน่งและความเร็วในระบบต่าง ๆ
Rotary Encoder (โรตารี่เอนโค้ดเดอร์) คืออะไร

Rotary Encoder (โรตารี่เอนโค้ดเดอร์) คือ เซนเซอร์ที่ใช้ตรวจจับตำแหน่งและความเร็วในการหมุน โดยการแปลงการเคลื่อนที่เชิงกลแบบหมุนให้กลายเป็นสัญญาณไฟฟ้า จากนั้นจะนำสัญญาณเหล่านี้ไปประมวลผลเพื่อวิเคราะห์ข้อมูลต่าง ๆ เช่น ตำแหน่งของมุม (Angular Position) เพื่อวัดตำแหน่งการหมุนของล้อหรือข้อต่อ, วัดความเร็วรอบ (Rotational Speed), หรือทิศทางการหมุน (Direction of Rotation) ซึ่งงถูกนำไปประยุกต์ใช้ในงานอุตสาหกรรมและระบบควบคุมอัตโนมัติต่าง ๆ มากมายในปัจจุบัน
ความสำคัญ ของ Rotary Encoder อยู่ที่ความสามารถในการบอก “ตำแหน่ง” หรือ “ระยะทางในการหมุน” ได้อย่างต่อเนื่องและทันที ทำให้ระบบควบคุมเข้าใจว่าเพลากำลังหมุนอยู่ที่มุมเท่าไร หรือหมุนไปกี่รอบแล้ว ซึ่งเป็นข้อมูลสำคัญในการบังคับทิศทาง ควบคุมความเร็ว รวมไปถึงการควบคุมตำแหน่งให้ตรงตามที่ต้องการโดยอัตโนมัติ
Rotary Encoder (โรตารี่เอนโค้ดเดอร์) มีกี่ประเภท
โดยทั่วไปสามารถแบ่ง Rotary Encoder ออกเป็น 2 ประเภทหลัก ๆ ตามการอ่านและการเก็บข้อมูลตำแหน่งของการหมุน ได้แก่
1. Incremental Rotary Encoder
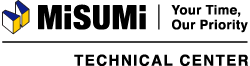
หลักการทำงานของ Incremental Rotary Encoder : ทำงานโดยใช้ดิสก์ที่มีช่องสลิต (Slit) สำหรับ Phase A, Phase B และ Phase Z ซึ่งยึดติดกับเพลา โดยเมื่อเพลาหมุน แหล่งกำเนิดแสง (Emission element) จะส่งแสงผ่านสลิต ซึ่งตัวรับแสง (Detector element) จะเปลี่ยนเป็นสัญญาณดิจิทัล (High/Low)

รูปแบบของสัญญาณที่ส่งออกมา
สัญญาณ Phase A และ Phase B
- แผ่นดิสก์จะมีสลิตสำหรับ Phase A และ Phase B คนละตำแหน่ง โดยเจาะให้เหลื่อมกัน เพื่อให้สัญญาณเอาต์พุตสองช่องนี้ต่างกัน 90 องศาทางไฟฟ้า (หรือ 1/4 pitch) ซึ่งเมื่อดิสก์หมุนไป สัญญาณดิจิทัลจาก Phase A และ Phase B จะแสดงออกมาเป็นคลื่นรูปสี่เหลี่ยม (Square wave) สลับกันเปิด/ปิด (High/Low) ด้วยการเลื่อนเฟสที่แตกต่างกันระหว่างสัญญาณสองชุดนี้ ทำให้สามารถระบุทิศทางการหมุนได้ (หาก A นำ B หรือ B นำ A)
สัญญาณ Phase Z หรือ สัญญาณ Index
- นอกจากช่อง A และ B ยังมี Phase Z ซึ่งเป็น “ช่องพิเศษ” ที่จะสร้างพัลส์ เพียงหนึ่งครั้งต่อการหมุนครบ 1 รอบ
พัลส์นี้มักใช้เป็นตำแหน่งอ้างอิง (Origin) เพื่อบอกว่าเพลากำลังหมุนมาถึงจุด “ศูนย์” หรือจุดเริ่มต้นของรอบ
ข้อดี: มีโครงสร้างไม่ซับซ้อน ราคาย่อมเยา ตอบสนองรวดเร็ว เหมาะกับงานวัดความเร็ว หรือใช้ในงานที่ไม่ต้องการเก็บข้อมูลตำแหน่งตลอดเวลา
ตัวอย่างการใช้งาน: ใช้ในระบบที่ต้องการตรวจจับความเร็วรอบของมอเตอร์, การนับจำนวนรอบของลูกกลิ้งในสายพาน
2. Absolute Rotary Encoder

ภาพนี้แสดงหลักการทำงานของ Absolute Rotary Encoder ซึ่งแตกต่างจาก Incremental Rotary Encoder ตรงที่อุปกรณ์จะให้ ค่าตำแหน่งตลอดการหมุน โดยในภาพจะเห็นดิสก์ (Rotor disk) ที่มี หลายแทร็ก (Tracks) พร้อมกับแหล่งกำเนิดแสง (Emission elements) และ ตัวรับแสง (Detector elements) สำหรับแต่ละแทร็ก
หลักการทำงาน ดิสก์ที่มีลายหลายแทร็กใน Absolute Encoder ถูกออกแบบให้มีช่องในแต่ละแทร็กที่ไม่เหมือนกัน โดยในแต่ละแทร็กจะให้ข้อมูลเป็น “บิต” ที่เชื่อมโยงกับมุมของการหมุนของเพลา เช่น แทร็กในสุดเป็นบิตต่ำสุด (20) และแทร็กถัดไปจะเป็นบิตที่สูงขึ้น (21, 22, …) แสงจาก Emitter (LED) จะผ่านช่องหรือถูกบังโดยลายในแต่ละแทร็ก และตัวรับแสง (Detector) จะแปลงการเปลี่ยนแปลงของแสงเป็นสัญญาณดิจิทัล (High/Low) คือบิตตำแหน่งที่ระบุให้เป็นเลขฐาน 2 เมื่อมีหลายแทร็กก็จะได้สัญญาณดิจิทัลหลายบิตที่บ่งบอกตำแหน่งของเพลาตลอดการหมุน โดยไม่ต้องมีการตั้งค่าตำแหน่ง Homing ใหม่เหมือนกับ Encoder แบบ Incremental ความละเอียดของตำแหน่งจะขึ้นอยู่กับจำนวนแทร็กที่มีในดิสก์ เช่น 10 บิตจะให้ 1024 ตำแหน่งต่อรอบ และ 12 บิตจะให้ 4096 ตำแหน่งต่อรอบ ยิ่งมีแทร็กมาก ความละเอียดก็จะยิ่งสูง.

ภาพนี้แสดงลักษณะการเปลี่ยนสถานะของ “บิต” แต่ละตัวใน Absolute Encoder ซึ่งแต่ละบิตจะเปลี่ยนตามลวดลายบนแทร็กของดิสก์ โดย
- 20 (บิตต่ำสุด) จะเปลี่ยนสถานะถี่ที่สุด (เปรียบเหมือนสัญญาณความถี่สูง)
- 21, 22, 23 จะเปลี่ยนสถานะลดหลั่นกันไป (ครึ่งหนึ่งของบิตต่ำกว่า)
ยิ่งมีบิตมาก (เช่น 2n) ก็สามารถระบุตำแหน่งได้ละเอียดขึ้นตาม “ความละเอียด (Resolution)” ที่ต้องการ ในรูปจะแสดงให้เห็นว่าแต่ละบิตมี “รอบการเปลี่ยน” ของตนเอง และเมื่ออ่านค่าทุกบิตพร้อมกัน จะได้โค้ดไบนารีที่ใช้บอก ตำแหน่งของเพลา โดย “1 pitch” คือช่วงการนับหนึ่งบิต (บิต 20) ก่อนที่สถานะจะกลับมาเริ่มนับใหม่ในรอบถัดไป.
ข้อดี: ไม่ต้องทำ Homing ใหม่ตลอดเวลา ทำให้การควบคุมระบบที่ต้องการการระบุตำแหน่งทันทีโดยไม่ผิดพลาดเป็นไปได้อย่างราบลื่น
ตัวอย่างการใช้งาน: งานที่ต้องการความแม่นยำสูง หรือมีการเก็บข้อมูลตำแหน่งตลอดเวลา เช่น หุ่นยนต์อุตสาหกรรม เครื่อง CNC ระบบแขนกล อุปกรณ์แพ็คเกจจิ้งอัตโนมัติ ฯลฯ
จบไปแล้วนะครับสำหรับบทความ “รู้จักกับ Rotary Encoder เบื้องต้น” ที่พาเพื่อน ๆ ทำความรู้จักกับอุปกรณ์สำคัญอย่าง Rotary Encoder ทั้งหลักการทำงานและประเภทต่าง ๆ ไม่ว่าจะเป็น Incremental หรือ Absolute Rotary Encoder ที่มีการใช้งานหลากหลายในอุตสาหกรรมและระบบอัตโนมัติ เราหวังว่าบทความนี้จะช่วยให้คุณเข้าใจการทำงานและประโยชน์ของ Rotary Encoder มากขึ้น หากเพื่อน ๆ กำลังมองหา Rotary Encoder คุณภาพสูงจากแบรนด์ชั้นนำ ขอแนะนำ OMRON Rotary Encoder ที่ได้รับการยอมรับในเรื่องความทนทานและความแม่นยำสูง สามารถเลือกซื้อสินค้าได้ที่ OMRON Rotary Encoders – MISUMI

