
รู้ก่อนใช้งาน! เทคนิคควบคุมอุณหภูมิด้วย Temperature Controller
สารบัญ
Temperature Controller หรืออุปกรณ์ควบคุมอุณหภูมิ เป็นตัวช่วยสำคัญในงานวิศวกรรมโดยเฉพาะงานที่ต้องควบคุมอุณหภูมิเป็นสิ่งสำคัญ ไม่ว่าจะเป็นในกระบวนการผลิต การควบคุมสภาพแวดล้อม รวมไปถึงในระบบเครื่องจักรอัตโนมัติ โดยเฉพาะงานที่ต้องควบคุมอุณหภูมิให้เป๊ะๆ ตัวอย่างเช่น ระบบทำความเย็น ,ระบบ HVAC เป็นต้น ในการเลือกใช้เทคนิคการควบคุมอุณหภูมิให้เหมาะสมนั้น มีผลโดยตรงต่อประสิทธิภาพและความเสถียรของระบบ ซึ่งสามารถแบ่งการควบคุมหลัก ๆ ได้เป็น 3 รูปแบบคือ ON-OFF, Proportional และ PID ซึ่งในบทความนี้จะเปรียบเทียบทั้งสามแบบอย่างละเอียดเพื่อให้เพื่อนๆ สามารถเลือกใช้งานได้อย่างเหมาะสม
1. ON-OFF Control (การควบคุมแบบเปิด-ปิด)
การควบคุมแบบ ON-OFF (ON-OFF Control) เป็นรูปแบบการควบคุมที่ง่ายที่สุดในระบบควบคุมอุณหภูมิมีการใช้งานกันอย่างกว้างขวางในหลายระบบอุตสาหกรรม โดย ระบบจะมีเพียง สองสถานะ (2 States) เท่านั้น คือ :
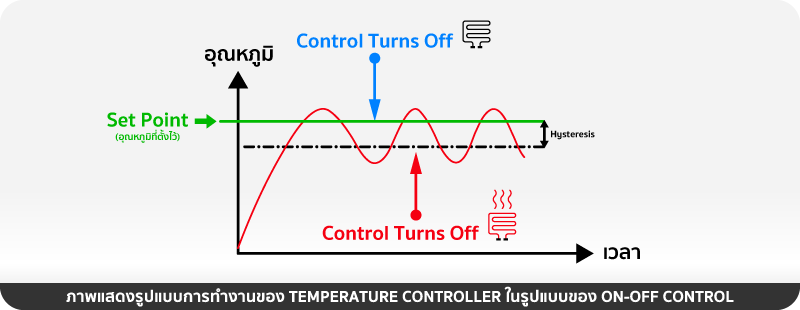
- Control Turns On: เมื่ออุณหภูมิลดต่ำกว่าค่า Set Point → ระบบจะ “เปิด” การทำงาน (เช่น เปิดฮีตเตอร์เพื่อเพิ่มอุณหภูมิ)
- Control Turns Off: เมื่ออุณหภูมิสูงเกินกว่าค่า Set Point → ระบบจะ “ปิด” การทำงาน (เช่น ปิดฮีตเตอร์เมื่อร้อนเกิน)
โดยระบบนี้มักจะ มักจะใช้ร่วมกับ “Hysteresis” หรือช่วงหน่วง มีไว้เพื่อป้องกันการทำงานบ่อย ๆ (เช่น เปิด/ปิดทุกครั้งที่อุณหภูมิเปลี่ยนเล็กน้อย)
| ข้อดี | ข้อเสีย |
|---|---|
| – โครงสร้างง่าย ต้นทุนต่ำ | – มีการแกว่ง (Oscillation) ของอุณหภูมิรอบจุดตั้งค่า |
| – ไม่ต้องการการจูนค่าพารามิเตอร์ | – ไม่เหมาะกับระบบที่ต้องการความเสถียรหรือแม่นยำ |
| – เหมาะสำหรับระบบที่ไม่ต้องการความแม่นยำสูง | – อาจทำให้อุปกรณ์สึกหรอเร็วเนื่องจากการเปิด-ปิดบ่อยครั้ง |
2. Proportional Control
การควบคุมแบบ Proportional Control เป็นวิธีการควบคุมที่ใช้ในการอแก้ไขปัญหาในเรื่องของ Undershoot และ Overshoot โดยอาศัยหลักกการการตอบสนองตามค่าความคลาดเคลื่อน (Error) ระหว่าง ค่าตั้ง (Setpoint) กับ ค่าที่วัดได้จริง (Process Variable) โดย:
Error=Set point − Process Variable
และค่าที่จะใช้ควบคุมอุปกรณ์ (เช่น ฮีตเตอร์) จะถูกคำนวณจากสูตร:
| Output=Kp × Error | โดยที่: Kp = ค่าคงที่ของการควบคุมแบบสัดส่วน (Proportional Gain) |
| Output = ค่าควบคุม เช่น แรงดันไฟฟ้าหรือกำลังไฟฟ้าที่ส่งให้ฮีตเตอร์ |
ตัวอย่างการใช้งานใน Temperature Controller

ภาพนี้แสดงระบบควบคุมแบบป้อนกลับ (Feedback Control System) ที่ใช้หลักการ Proportional Control ในการควบคุมการทำงานของระบบ โดยระบบจะเปรียบเทียบค่าที่ต้องการ (Setpoint) กับค่าจริงของระบบ (y(t)) เพื่อหาค่าความคลาดเคลื่อน (Error) จากนั้นจะส่งค่า Error นี้เข้าสู่ตัวควบคุมแบบสัดส่วน (Proportional Controller) ซึ่งจะคำนวณสัญญาณควบคุมตามสมการ u(t) = Kp × Error โดยที่ Kp เป็นค่าคงที่ของตัวควบคุมแบบสัดส่วนแล้ว ระบบจะสั่งงานไปยังPlant และได้ผลลัพธ์ y(t) ซึ่งจะถูกส่งกลับมาเป็น Feedback เพื่อนำไปเปรียบเทียบกับ Set point ใหม่อีกครั้ง เป็นวงจรการควบคุมอัตโนมัติที่ทำงานต่อเนื่อง เพื่อให้ y(t) ใกล้เคียงกับค่าที่ตั้งไว้มากที่สุด
ตัวอย่างเช่น ในกรณีของระบบควบคุมอุณหภูมิโดยใช้ฮีตเตอร์ต้องการให้อุณหภูมิคงที่ที่ 100°C ถ้าอุณหภูมิจริง อยู่ที่ 90°C → Error = 10°C และถ้า Kp = 5 จะได้ u(t) = 50% หมายถึงจ่ายไฟให้ฮีตเตอร์ 50% เพื่อเพิ่มอุณหภูมิ เมื่อใกล้ถึงเป้าหมาย เช่น อุณหภูมิขึ้นมาเป็น 98°C → Error เหลือ 2°C → u(t) = 10% ระบบจะลดการจ่ายพลังงานลงอย่างเหมาะสม ทำให้ควบคุมอุณหภูมิได้อย่างแม่นยำและเสถียรตามหลักการของ Proportional Control ภายในระบบป้อนกลับนี้
| ข้อดี | ข้อเสีย |
|---|---|
| – ลดอาการแกว่งของอุณหภูมิได้ดีกว่า ON-OFF | – เกิด Offset หรือค่าคงเหลือ (Error) บางส่วน |
| – ควบคุมได้ราบรื่นและต่อเนื่อง | – ต้องจูนค่า Gain (Kp) ให้เหมาะสมกับระบบ |
| – ลด Overshoot ได้ดีไม่ต้องเปิด-ปิดอุปกรณ์บ่อย | – อาจต้องใช้ร่วมกับ Integral Control เพื่อชดเชย Error ที่คงเหลือ |
3. PID Control (Proportional + Integral + Derivative)
PID Control เป็นวิธีการควบคุมที่ได้รับความนิยมสูงมากในงานควบคุมอัตโนมัติ เนื่องจากสามารถให้ผลลัพธ์ที่แม่นยำ ตอบสนองเร็ว และลดค่า Error ได้ทั้งในระยะสั้นและระยะยาว โดยอาศัยการรวมกันของ 3 องค์ประกอบหลัก ได้แก่: เป็นการรวมข้อดีของทั้งสามองค์ประกอบในการควบคุม:

 | P (Proportional): ช่วยให้ระบบตอบสนองเร็ว ตามขนาดของ Error ถ้า Error มาก → Output มาก (จ่ายไฟมาก) ถ้า Error น้อย → Output น้อย (จ่ายไฟลดลง) |
 | I (Integral) จะทำหน้าที่ สะสมค่าความผิดพลาด (Error) ที่เกิดขึ้นเรื่อย ๆ ตลอดช่วงเวลา เพื่อ ชดเชย Residual Error ที่ส่วน Proportional (P) อย่างเดียวไม่สามารถจัดการได้ |
 | D (Derivative) จะ คาดการณ์ว่า Error กำลังจะเปลี่ยนแปลงไปอย่างไรในอนาคต โดยดูจาก “ความเร็วในการเปลี่ยนแปลงของ Error” หรือที่เรียกว่า อนุพันธ์ของ Error ตามเวลา |
การทำงานร่วมกันของ PID ช่วยให้ระบบตอบสนองได้ไว แม่นยำ และเสถียร
| ข้อดี | ข้อเสีย |
|---|---|
| – แม่นยำสูง ลดทั้ง Offset และ Overshoot | – ซับซ้อนกว่าระบบอื่น ต้องเข้าใจหลักการและการจูนพารามิเตอร์ (Kp, Ki, Kd) |
| – เหมาะกับระบบที่ซับซ้อนหรือมี Time Delay | – ใช้อุปกรณ์ที่มีราคาสูงกว่า |
| – ควบคุมได้ราบรื่นและสเถียรที่สุด | – หากจูนไม่เหมาะสมอาจทำให้ระบบไม่เสถียร |
จบไปแล้วนะครับสำหรับบทความ “รู้ก่อนใช้งาน! เทคนิคควบคุมอุณหภูมิด้วย Temperature Controller” ที่พาเพื่อน ๆ ไปทำความเข้าใจกับการทำงานของอุปกรณ์ควบคุมอุณหภูมิ (Temperature Controller) ในรูปแบบต่าง ๆ ไม่ว่าจะเป็น ON-OFF, Proportional และ PID พร้อมเปรียบเทียบข้อดีข้อเสียของแต่ละแบบอย่างละเอียด โดยเฉพาะจุดเด่นด้านความแม่นยำ ความเสถียร และความเหมาะสมกับประเภทงานต่าง ๆ หากเพื่อนๆ กำลังมองหาอุปกรณ์ควบคุมอุณหภูมิคุณภาพสูง ขอแนะนำ OMRON Temperature Controllers